The pink salmon or humpback salmon is an invasive species in Norwegian rivers. The fish has a two years cycle, which means that the fish that spawn comes back from the ocean after two years. Since the fish migrates back to the rivers after two years, and then die there are two separate populations, one highly successful that enters the rivers in odd-numbered years and one much less successful that enters in even-numbered years. This behaviour is the same for the natural habitat of the pacific and here in Norway where the fish is unwanted.
The County Governor of Troms and Finnmark submitted a tender to investigate the fish population of 4 Finnmark rivers, Karpelva, Vesterelva, Vestre Jakobselv and Neiden, which were awarded to Mohn Technology AS this spring. The main goal is to know more about the pink salmon population in even-numbered years like this year of 2024, and also compare natural species behaviour compared to last year which was a pink salmon year.
We have to this date registered a few dozen pink salmon, which is quite small compared to the tens of thousands that were captured in these rivers in 2023. See example video of a prime example below, taken at Karpelva.
Mohn Technology has long and broad experience with both AI based and conventional machine vision. We combine that experience with knowledge about underwater camera systems and robotics to create a tool that will aid fish farmers in inspecting their facilities.
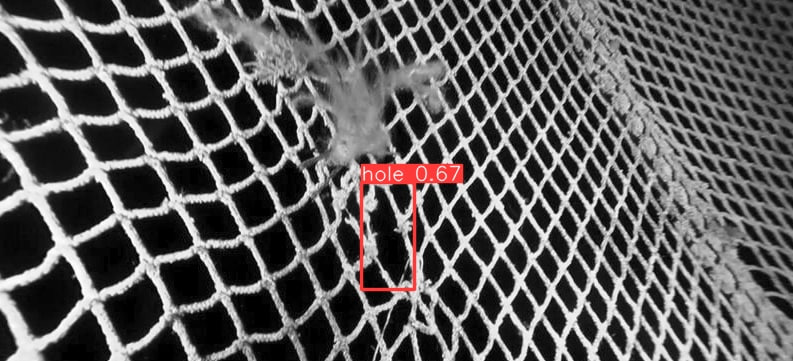
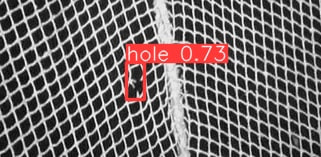
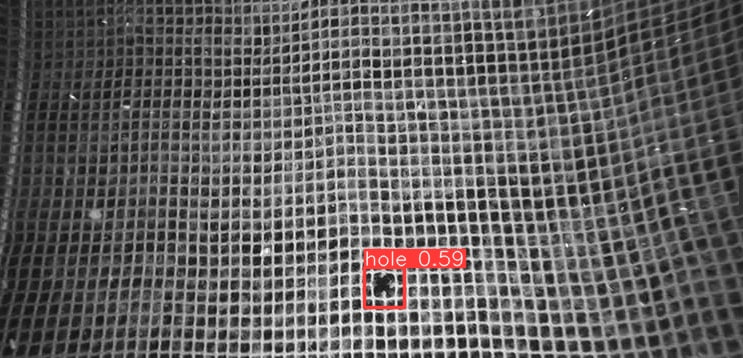
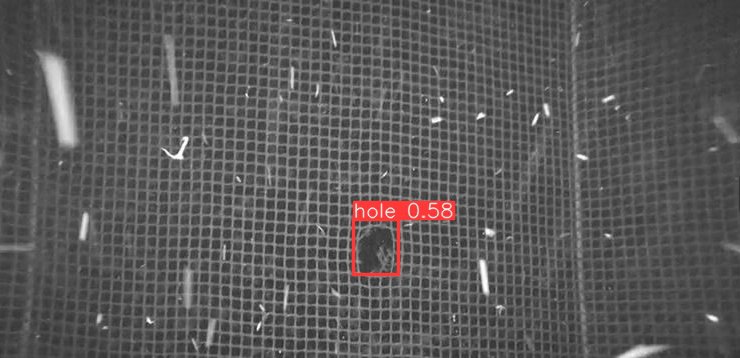
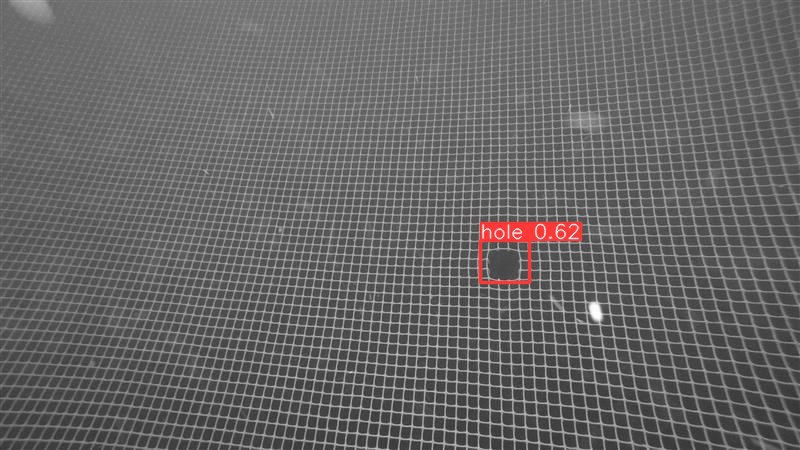
We have been working on various approaches on a sensitive, yet accurate way of detecting holes. The net pen is not just a net, it has ropes, knots, fouling, attached equipment etc. During the project we started with more conventional machine vision algorithms that look for holes with larger areas than the average. This works well for a clean and orderly net without foreign objects, equipment or ropes, but unfortunately that is not the case in reality. We have therefore developed machine vision algorithms that use artificial intelligence (AI) to seek out, track and report the holes.
Mohn Technology recently received a set of images of holes discovered in Norwegian facilities during operation. The holes were not big, but they gave us a realistic test of how holes would look in an actual facility. Until now, we had only tested with simulations, pool tests and scale models.
The images above are examples taken from real inspections where holes are found. All holes were discovered.
The video above shows hole detection and tracking algorithms on a video stream taken from a pool test. Note that this is a preliminary real time algorithm, and drone positioning data is not available for the tracking algorithm during this test, so the hole ID is lost once the hole tracking is lost momentary. During operation, the operator would get a notification if holes are detected, and the damage could be inspected manually. The net used is real aquaculture net pen received from a partner.
The invasive species Pink Salmon (also called Humpback Salmon) has become more and more problematic in Norwegian rivers recent years. The species are originally a Pacific salmon species, but were brought to Russian rivers in an effort to create a new fisheries industry there.
The County Governor of Troms and Finnmark has established a pre-commercial procurement competition where technology firms could present their solution to detect and sort out the invasive Pink Salmon from local species like Athlantic salmon, trout and Arctic char with minimal impact on local wildlife and the environment. Along with a wide variety of projects from a lot of highly competent government agencies and institutes, this competition will be an important contribution to controlling the establishment of a pink salmon population in Norwegian rivers.
Mohn Technology partnered up with the well established American firm FISHBIO, who specialise in river barriers, weirs and other structures to manipulate fish migration paths. Mohn Technology is responsible for developing camera hardware, lighting, AI fish detection algorithms and fish sorting units, whereas FISHBIO is focusing on river barriers, fish guiding and trap compartments.
Magnus Myklebost from Mohn Technology AS displays the AI based FRS camera before installing it in the Tana River 2023. In Tana, Mohn Technology cameras were placed around the trap that was run by the Norwegian Veterinary Institute to provide surveillance of fish behaviour and migration. Pink salmon pushing through the barrier in the Tana River detected by the FRS camera in 2023.Pink salmon in Vestre Jakobselv in 2023.
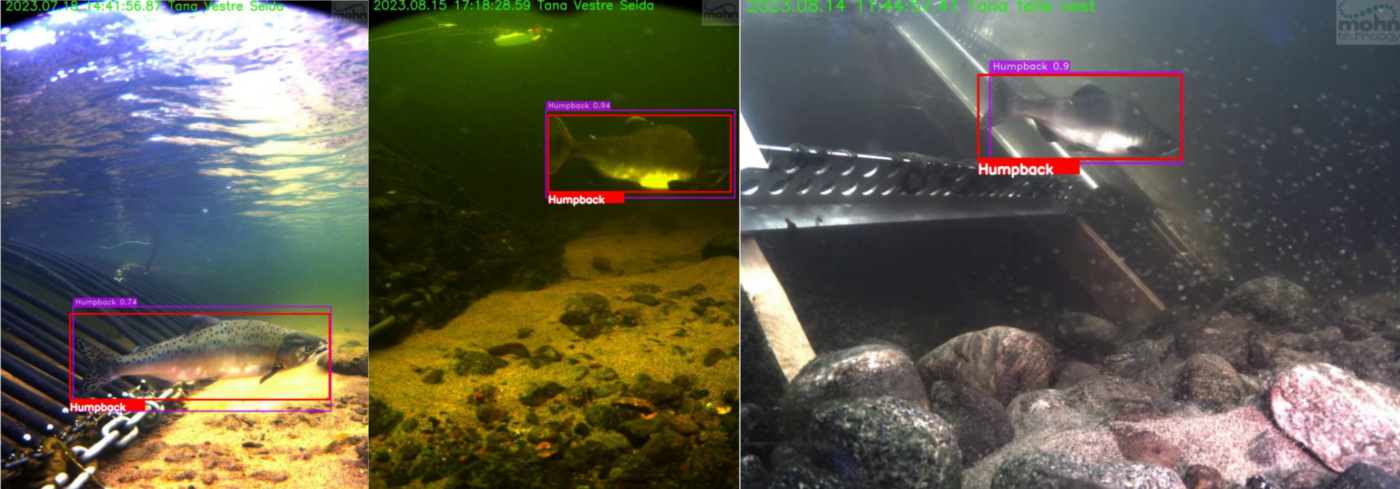
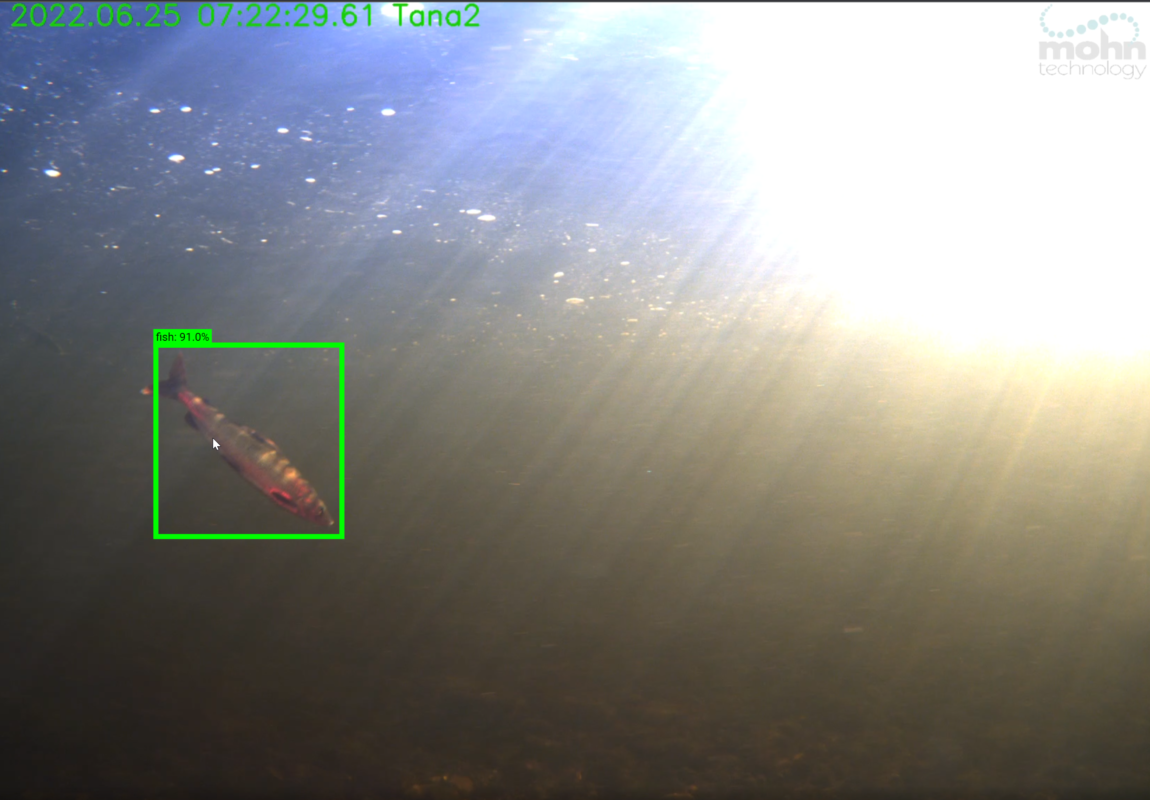
During the first phase of the competition Mohn Technology has annotated data and developed an AI prototype algorithm that displayed an accuracy of 97% between the species pink salmon, Atlantic salmon, trout and Arctic char per frame. The camera system runs on 30 frames per second, so you will get multiple evaluations within a fraction of a second, thereby basically getting 100% accuracy under normal conditions. These examples are taken from a wide variety of background, lighting and water conditions making it much harder for the algorithms to detect and analyse species than in a tunnel based environment.
Examples from our prototype AI algorithms detecting pink salmon (humpback salmon) in video taken in Tana river summer of 2023.
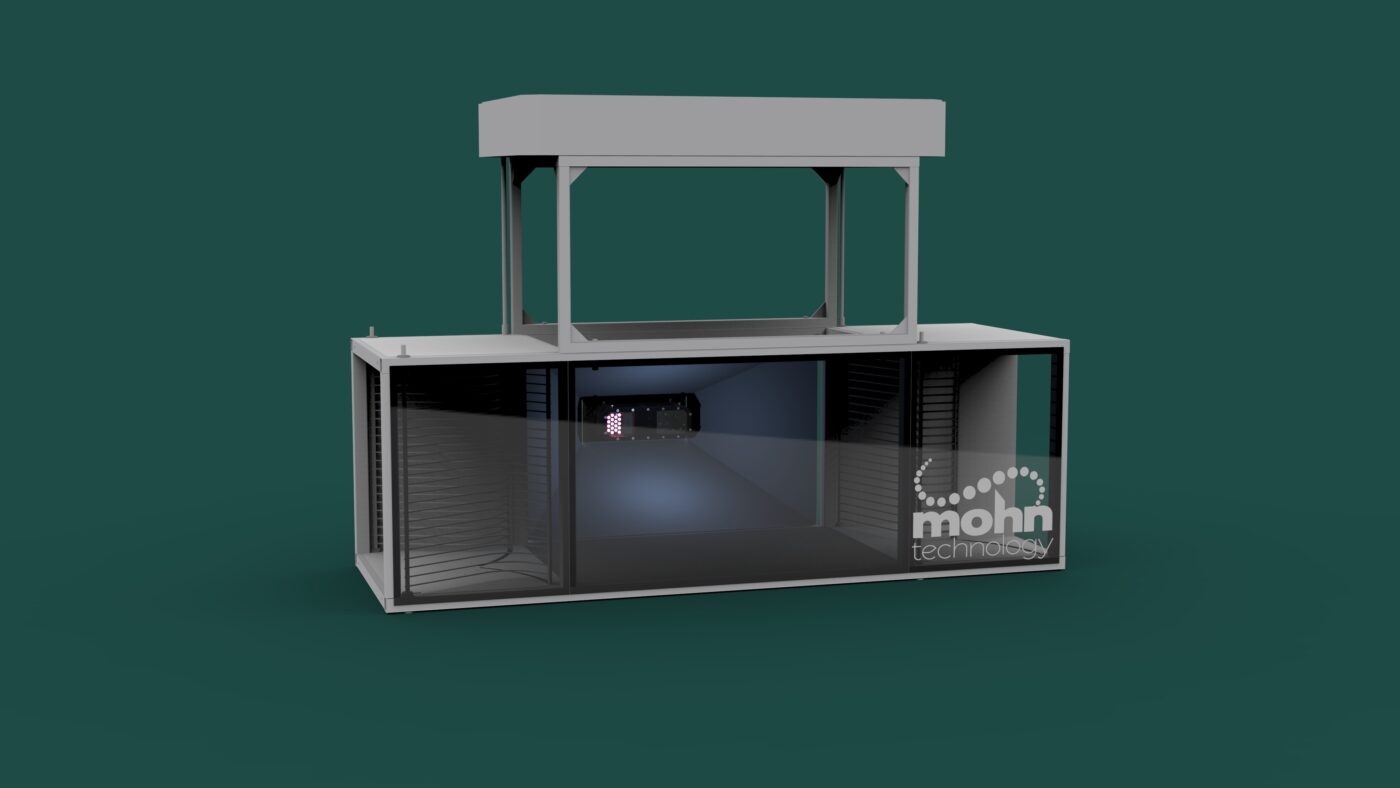
The proposed sorting concept is a modular design, where the fish are guided through a sorting channel. Inside the sorting channel, the fish are analysed using AI based machine vision algorithms. Native species are allowed to pass through the tunnel without interruption, whereas the pink salmon is guided into a waiting compartment for further processing.
Illustration of the AI based sorting unit
We are looking forward to working with FISHBIO, local fishing associations and The County Governor of Troms and Finnmark to develop this exciting technology that will ensure that the invasive species can be used as a resource and that the native species are not interrupted in their path to spawn.
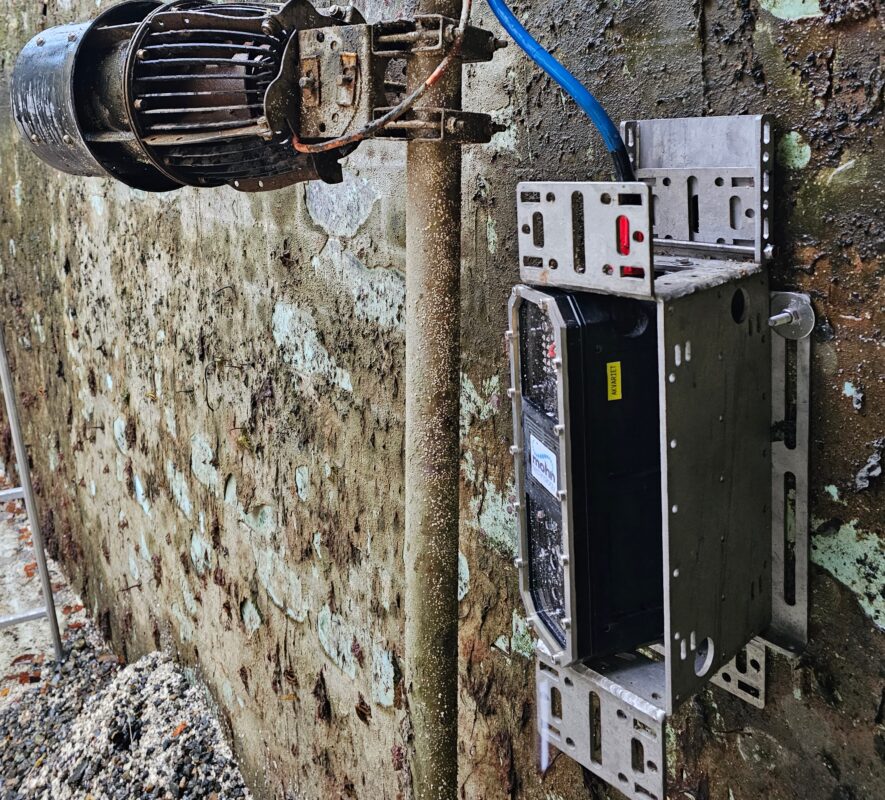
NORCE Research is tagging cods with motion sensors to learn from their behaviour. The motion sensor data is correlated to their behaviour which is observed through our FRS camera system. The camera is mounted on a hard to reach part of the aquarium, so the anti fouling technology is coming in handy.
The camera is mounted to the wall with a wall bracket in 316 steel. The whole system was mounted and active within a few days after we were contacted.
We just installed a PIT-tag reader (Passive Integrated Transponders) in Frøyset river. Reserachers have had noise issues at this location earlier, as the antenna is very sensitive to electro magnetic interference. We have made the system compatible with our FRS portal, where the tag readings are automatically added to our database and linked to fish video data. The new antenna had no issues with noise, and testing showed that it was sensitive enough to detect the smalles PIT tags.
We also upgraded the FRS camera located at the top of the fish ladder. This location is very hard to reach, as the whole dam and fish ladder is encased in water most of the time, and servicing the camera would be very high risk.
As the weather has been dry for weeks, there is very little water in the river the camera was pretty easily accessable. The camera now has the newest hardware and our state of the art anti fouling system, something especially usefull for hard to reach locations with high growth rates.
Picture below illustrates how massive the river can grow. The photo is taken by Sigmunn Rørvik, and shows how both the dam and fish ladder is completely engulfed in water.
We are looking forwards to getting more research data from this location!
We have had the pleasure to work with Erling Flåm Krogsrud, Markus Tønnessen and Bjørnar Torsvik Størkersen from HVL this semester. The students have worked on analysing and optimising a new hydrodynamic configuration of our Sentinel Inspection Drone.
The students have worked from our office one day per week, and have had hands-on experience with testing equipment in our workshop and in the sea right outside our office. The project included both CFD (computational fluid dynamics) and FEA (finite element analysis) simulations. We have been very pleased with their effort, and the project resulted in top grades, with an A.
We wish them best of luck with their upcoming masters degree studies at NTNU!
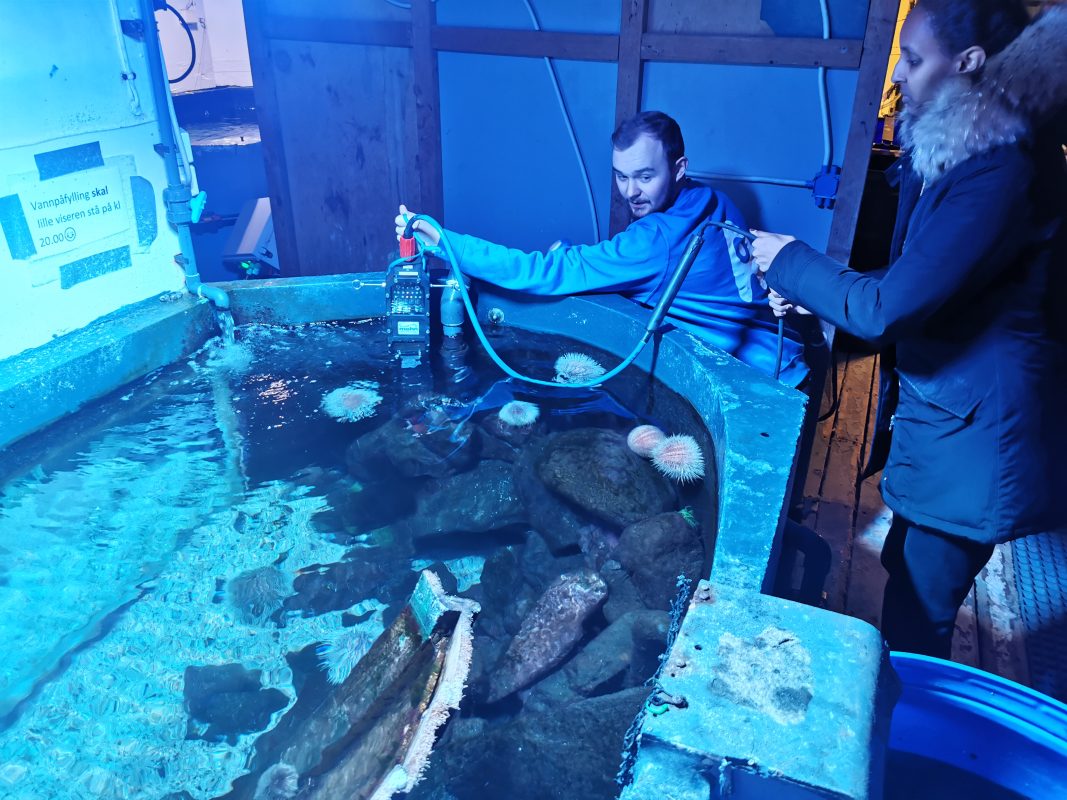
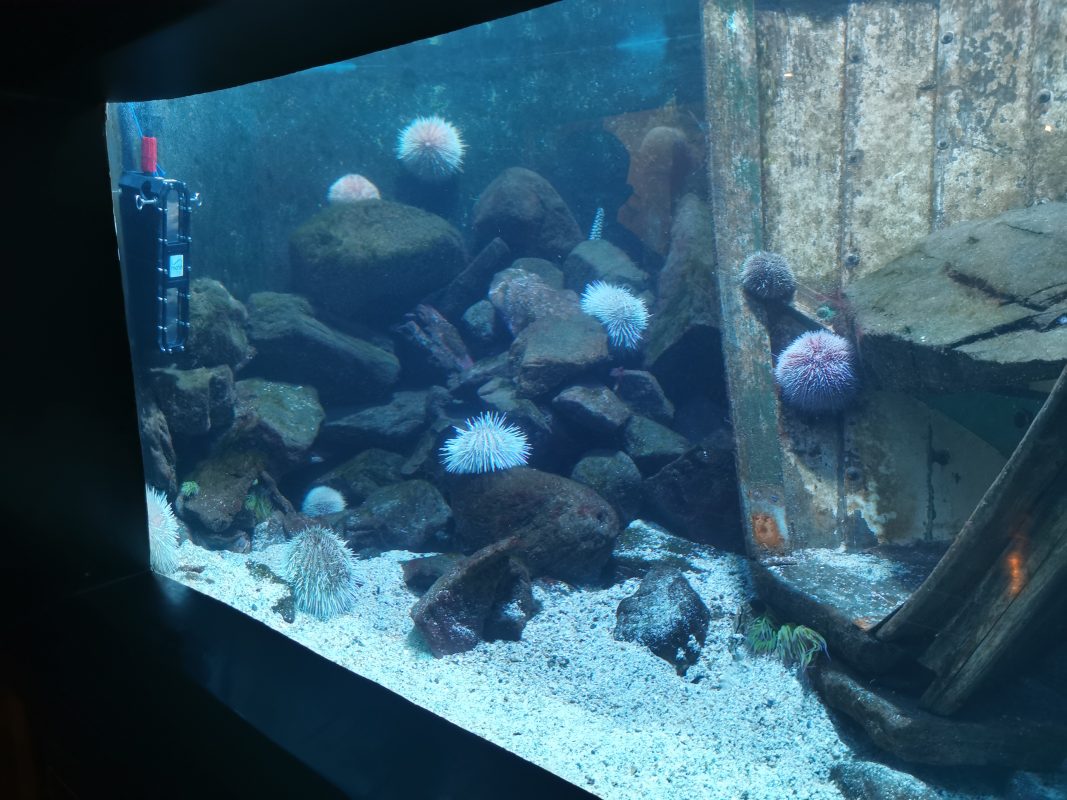
Researchers at NORCE are testing a new accoustic tracker with integrated IMU (Inertial measurement unit) in the lobster habitat of the Bergen Aquarium. The researchers want to compare the behaviour registered at the IMU with video of the lobster, to see how the different accelerations etc compares to actual movement of the lobster.
NORCE asked us if we could help them with the surveillence part of the project, and within about two hours we had mounted one of our FRS cameras in the tank.
In the photo below, Håkon Norstrand (Bergen Aquarium) and Saron Berhe (NORCE) is testing different camera positions in the lobster tank.
If you are visitin the Bergen Aquarium within the next weeks, look to the left in the lobster tank to see the camera. Ps. due to internal reflection of the window, the camera cant see out of the tank through the window. This was also a requirement from Bergen Aquarium due to privacy concerns.
Mohn Technology is expanding our investment in self-developed underwater products for fisheries, aquaculture and research purposes. Our office is located at Laksevåg, Bergen, with a good view of the city and the city mountains. Proximity to the sea and a good workshop enable us to create or modify prototypes, as well as test equipment in the sea right outside our window.
The work will have a major focus on practical use of the subject, with hands-on work, testing and implementation. You will receive close follow-up from our engineers who have good experience with image processing, cybernetics and product development. At the same time, as part of a small company, you will be given a lot of responsibility and will have a steep learning curve.
We are currently looking for skilled students who are passionate about their work, to join our small but resourceful team in 2023. We would like to combine a summer job with a subsequent project and master’s thesis, and are also looking for graduates for a full-time position. For summer internships, fourth year masters students and second year bachelor students will be prioritised. Info about previous student relations can be found here!
Typical tasks
Develop control algorithms for ROV/AUV
Use of mono/stereo camera to control/navigate ROV/AUV
Use of a stereo camera for object recognition and estimation of sizes
Use deep learning and develop/train an algorithm for recognizing certain objects
Develop an intuitive GUI for underwater drones, for both image analysis and control.
Frontend development with close customer contact
Learning outcome for the student (when writing a master’s thesis)
Development of modern camera and image technology that is relevant to business
Experience with control systems for underwater robots (ROV/AUV)
Practical experience with the development of products where camera systems interact with mechatronics
Gain experience with the development and practical use of deep learning, especially in image segmentation
Experience with testing prototypes
Our wish list:
Experience with and interest in machine vision and relevant libraries
Experience with or interest in Deep learning and CNN.
Experience with or interest in Javascript (Vue.js)
C/C++ / Golang / Python
Practical and interested in working closely with prototypes
Interest in or experience with ROS (Robot Operating System)
Brage Alvsvåg just finished his masters thesis at Department of Informatics at UiB. The title was “Improving fish detection using efficient neural networks”, and the project was done in association with Mohn Technology using our dataset. In his project, Brage tested different ways of improving our fish detection AI, with different kinds of neural networks and post-training quantization he managed to develop some promising algorithms that might proove to be very useful for us. We are looking forwards to testing out these strategies in real life operations in the coming months!
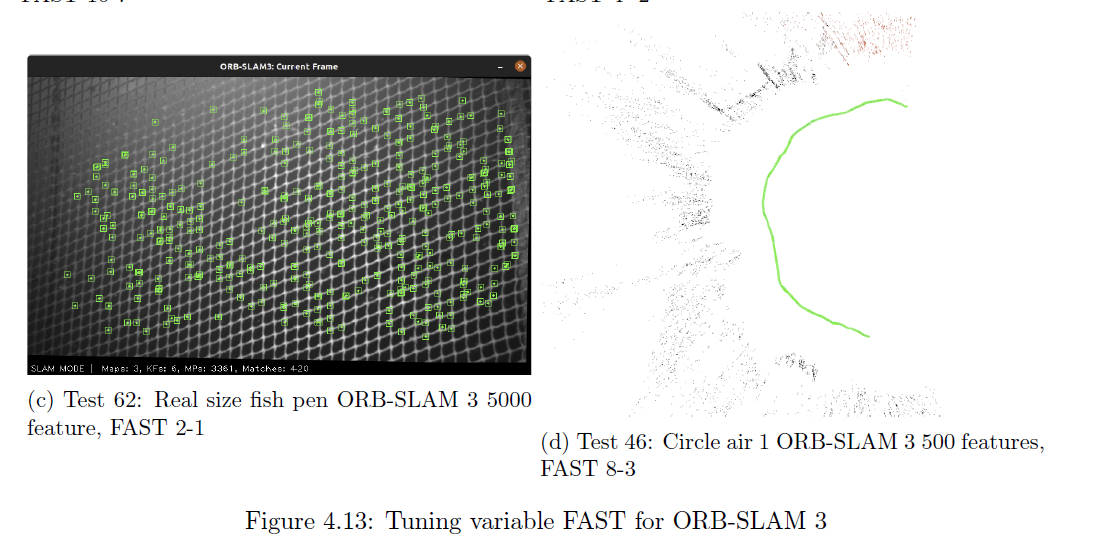
Håvard Ullaland also finished his master thesis this summer at Department of Engineering Cybernetics at NTNU. Håvards project was titled “Positioning and localization for underwater vehicle in fish pen using VSLAM”, and the work is related to our automatic net inspection tool that is supported by FHF. Håvards contribution to the project is related to navigate based on machine vision and IMU (Inertial measurement unit). The localization algoritms use the input from the machine vision and sensors to estimate where it is, and where it is going. If we succeed in only using VSLAM (Visual simultaneous localization and mapping) algoritms we can reduce the hardware cost and complexity of the system, and it will also require less setup of hardware on site before operation.
The photos above shows the stereo camera navigational points on the net to the left, and the right shows the algorithms estimated travel route along the net pen. The results are very promising.
After the masters thesis was delivered Håvard started working for us full time on the project, and will continue his work on underwater localization and navigation.
In cooperation with Tanafiskwe have installed a dual FRS camera pole in the Tana River.The humpback salmonmainly enters the rivers every other year, where they reproduce and die. The system will be used to verify the efficiency of the guide fence so that we are ready for the 2023 season where we expect a large invation of the humpack / pink salmon.
The humpback salmon is an invasive species in Norway, and the problem is spreading from the northern parts of Norway from Russia. Local fishing associations and river authorities have done a heroic job in 2021 and caught tens of thousands of fish based on volantary work.
Mohn Technology is working on a automatic fish trap that is based on our machine vision and underwater technology experience. We hope the system will be able to stop the spread of the invasive species and protect our own wild salmon, while also generating value from the catch. More info to come!