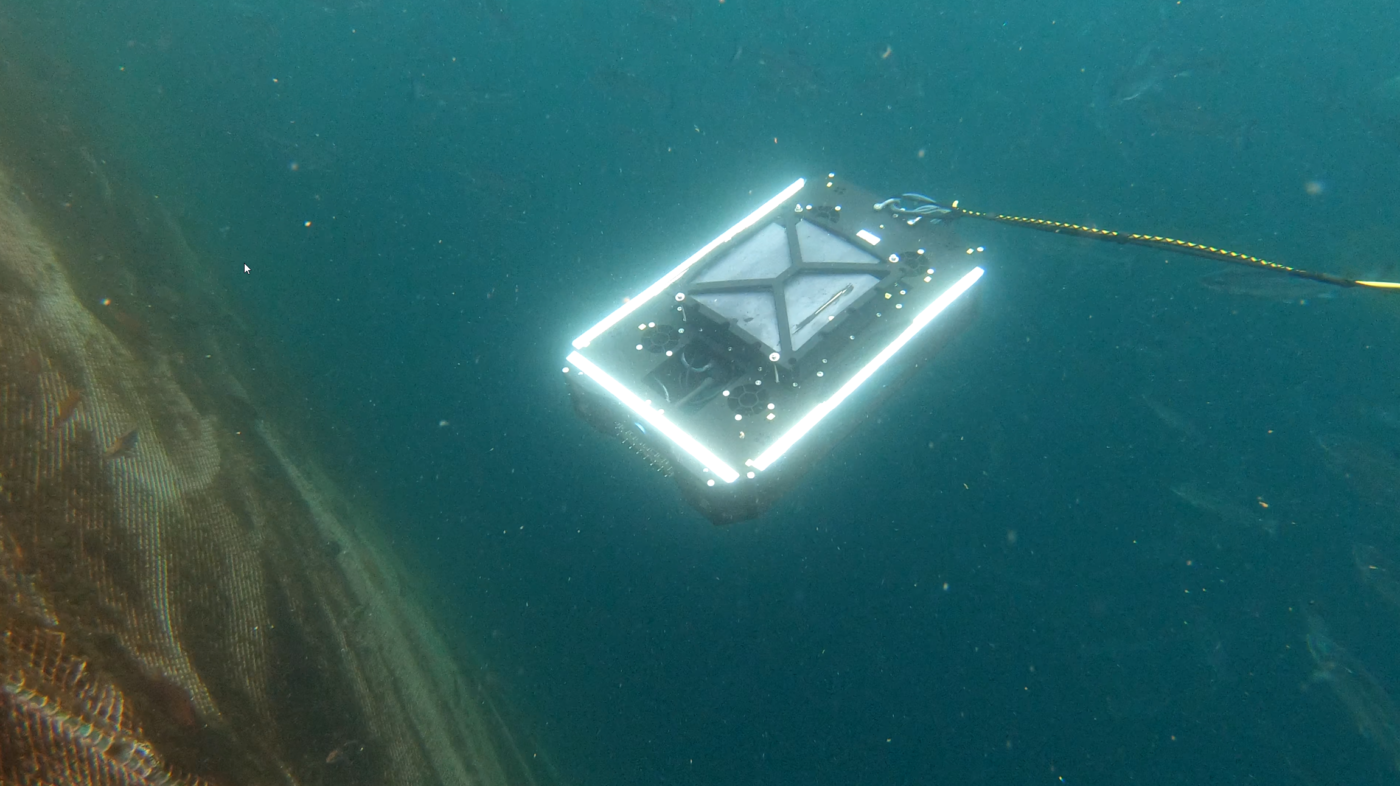
Mohn Technology is expanding our investment in self-developed underwater products for fisheries, aquaculture and research purposes. Our office is located at Laksevåg, Bergen, with a good view of the city and the city mountains. Proximity to the sea and a good workshop enable us to create or modify prototypes, as well as test equipment in the sea right outside our window.
The work will have a major focus on practical use of the subject, with hands-on work, testing and implementation. You will receive close follow-up from our engineers who have good experience with image processing, cybernetics and product development. At the same time, as part of a small company, you will be given a lot of responsibility and will have a steep learning curve.
We are currently looking for skilled students who are passionate about their work, to join our small but resourceful team in 2023. We would like to combine a summer job with a subsequent project and master’s thesis, and are also looking for graduates for a full-time position. For summer internships, fourth year masters students and second year bachelor students will be prioritised. Info about previous student relations can be found here!
Typical tasks
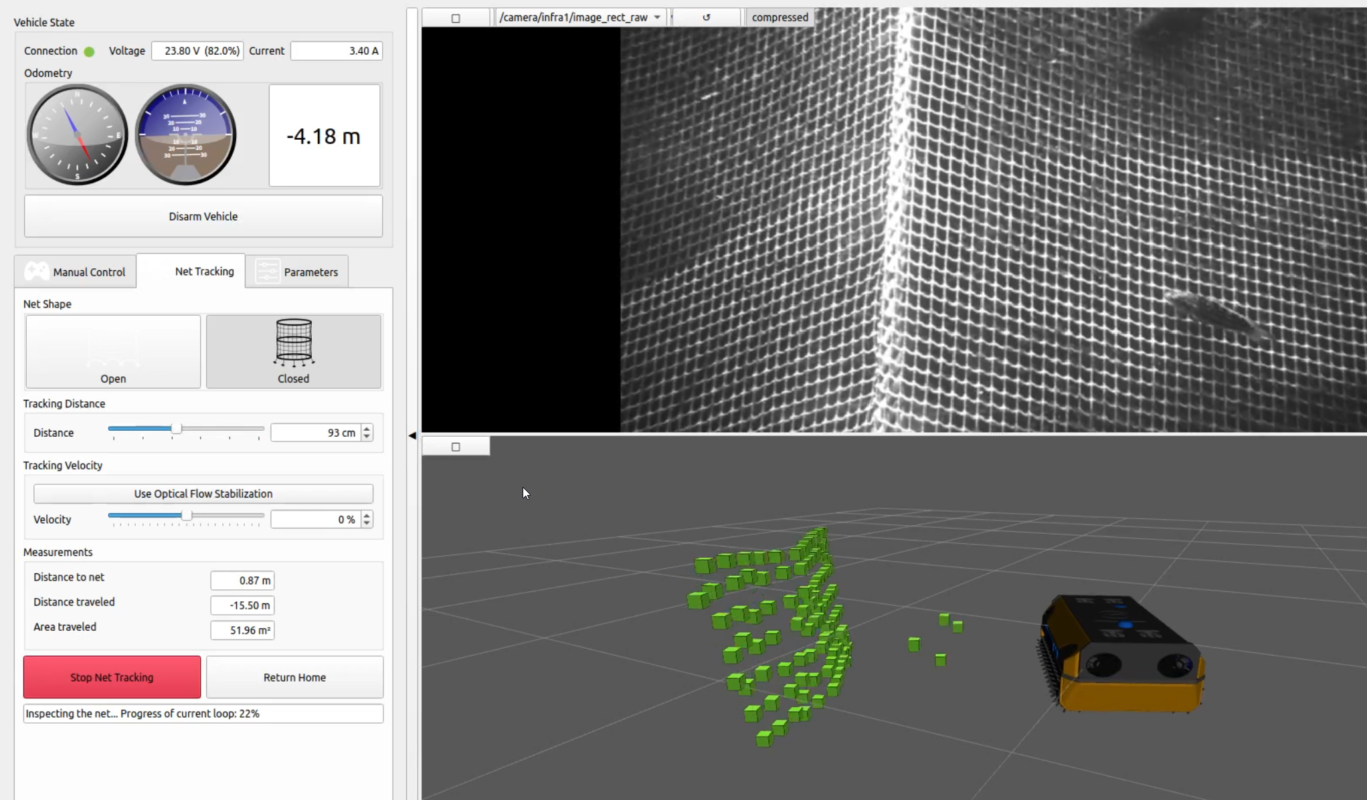
- Develop control algorithms for ROV/AUV
- Use of mono/stereo camera to control/navigate ROV/AUV
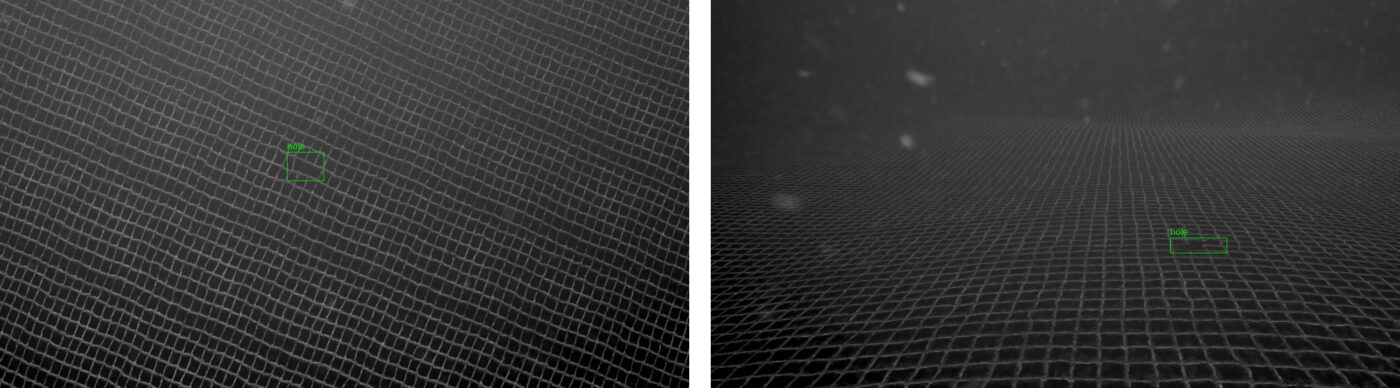
- Use of a stereo camera for object recognition and estimation of sizes
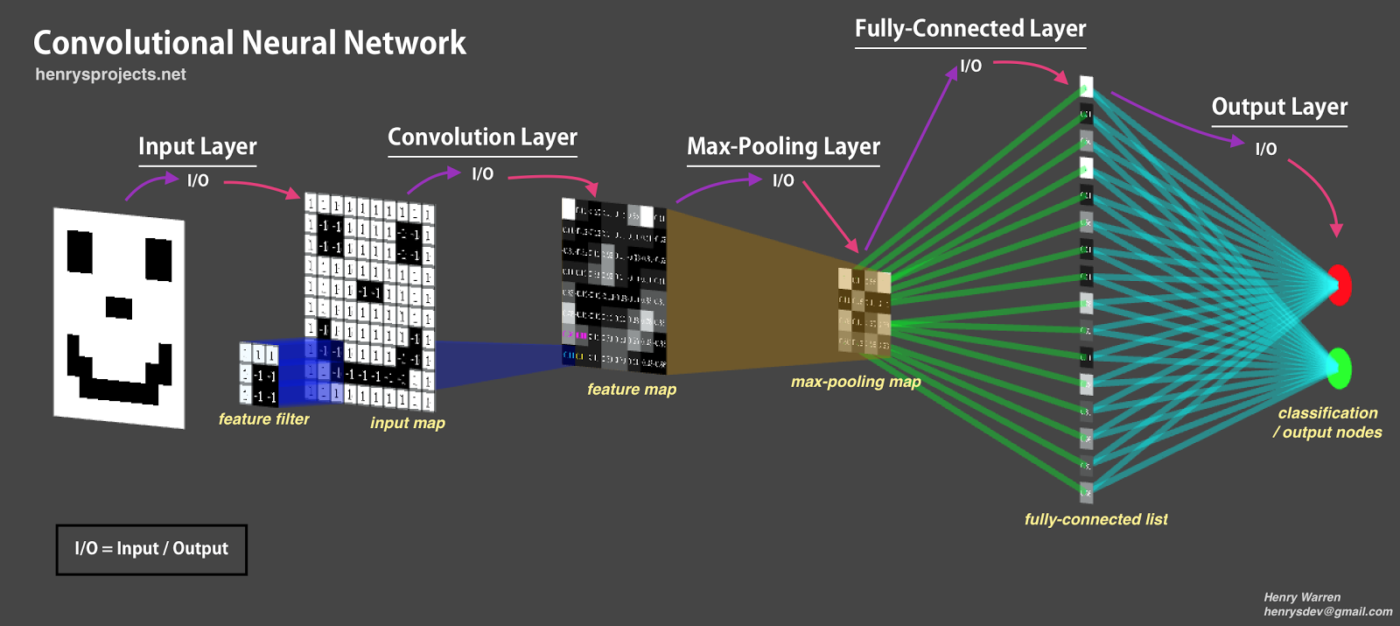
- Use deep learning and develop/train an algorithm for recognizing certain objects
- Develop an intuitive GUI for underwater drones, for both image analysis and control.
- Frontend development with close customer contact
Learning outcome for the student (when writing a master’s thesis)
- Development of modern camera and image technology that is relevant to business
- Experience with control systems for underwater robots (ROV/AUV)
- Practical experience with the development of products where camera systems interact with mechatronics
- Gain experience with the development and practical use of deep learning, especially in image segmentation
- Experience with testing prototypes
Our wish list:
- Experience with and interest in machine vision and relevant libraries
- Experience with or interest in Deep learning and CNN.
- Experience with or interest in Javascript (Vue.js)
- C/C++ / Golang / Python
- Practical and interested in working closely with prototypes
- Interest in or experience with ROS (Robot Operating System)
Contact magnus (at) mohntechnology.no!